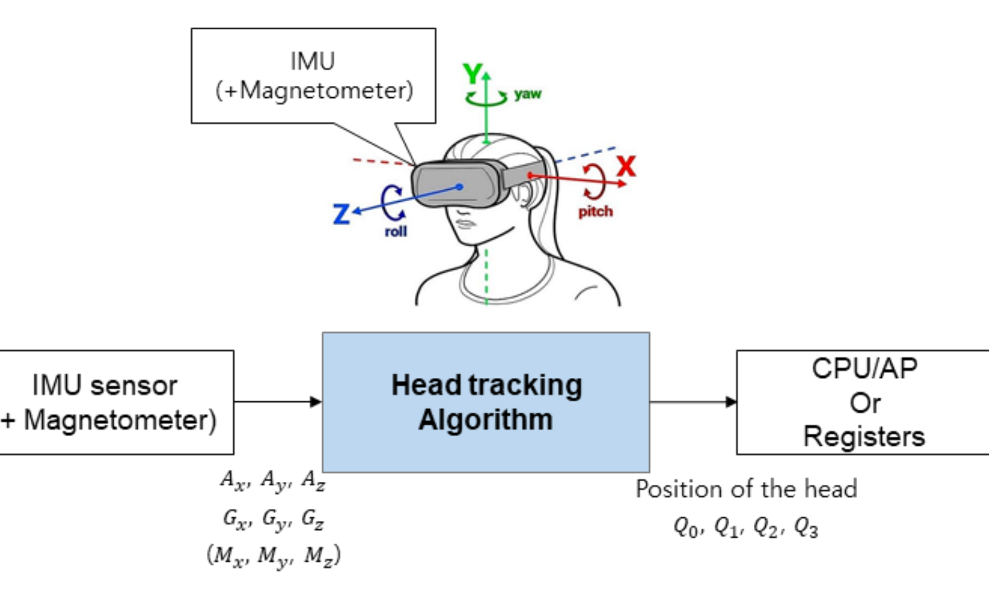
Co-processor design of Visual-SLAM and IMU sensor fusion for AR-VR applications
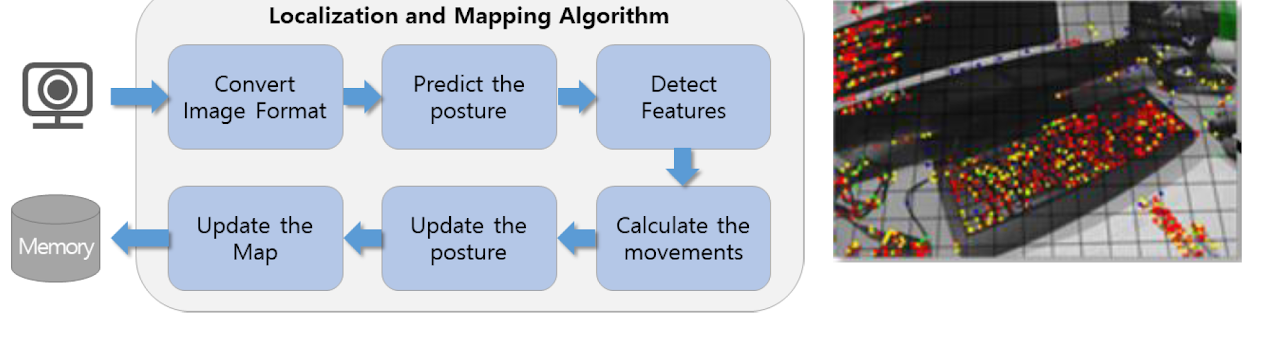
Duration: 2020 to 2023 Type: Joint project between institutes and industry Description: Developing a SoC that performs real-time location tracking using data input from AR devices and Inertia Measurement Unit Content: Utilizing the Extended Kalman filter (EKF) for motion estimation and Parallel Tracking and Mapping (PTAM) to create detailed maps of indoor spaces.